���飺����̽�y�͜y��ϵ�y(t��ng)(LIDAR)
�����Ă�ʾ���OӋ��ʾ�����ʹ��OptiSystemģ�M��z�y�͜y��ϵ�y(t��ng)��LIDAR�������w���£�
�� �����}�_�w�Еr�g�y��
�� ���Ɯy��
�� �{�l�B�m(x��)����FMCW��ֱ�әz�y�y����{�l�B�m(x��)����ɜy��
�D1.ʹ��ֱ�әz�y��FMCW LIDAR OptiSystemģ��ʾ��ҕ�D
1.�y��(�w�Еr�g)
1��ԭ������
ʹ�ü����}�_���w�Еr�g�y�෨�y���l(f��)���}�_�İl(f��)���b�����M��Ŀ�˲����ؽ����������M�ĕr�g�� Ȼ��Ӌ����x[1]
c�ǹ��١�
������̖�����Ǹ����UչĿ��ģ�ʹ_���ģ�Ӌ������[2]
���� Pt �ǂ�ݔ��ʣ�D �ǽ��������� ρ Ŀ�˷����ʣ� atm �Ǵ��p��ϵ����opt �ǹ��ݔϵ�y(t��ng)�p�����ӣ�R ��Ŀ�˷�����
���˿ɿ��ش_�����_�}�_�ij��l(f��)�r�g��ʹ�ú�ȶ��r�y��[3]��������Cpp�M�����F����
�D2.�y���x��TofF������
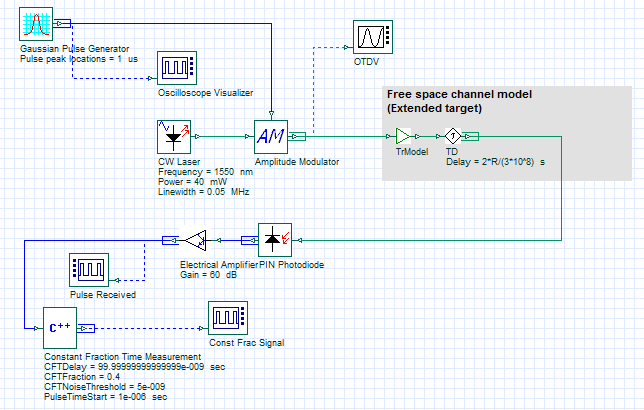
2������
�� �����ʾ���У�һ����˹�}�_(��ֵ�}�_�r�g= 1 us) ��ݔ�^���̓�MĿ�˷���(�����ɿ��g�ŵ�ģ�� (�UչĿ��)���x) ) �����^˥�p�����t��ͨ�^Cpp�M����ȶ��r�y�����z�y�ͺ�̎�����յ�����̖��
�� ���յ����}�_���ڳ�ӕr�g6.02e-06���|�l(f��)�ģ��M���l(f��)�Fԓ������751.27 m���cȫ�օ��������O�Þ�750 m����^���� ͨ�^��׃ݔ�녢��CFTDelay��CFTFraction��CFTNoiseThreshold�����ĺ���b�e�����`���ȡ�
�D3.����y��ϵ�y(t��ng)
2.�y��(����)
�y������/Ŀ�˵ľ��x����һ�N������ʹ�����Ɯy���x�� ����ԓ��������Դ���ض��l��Rf���{�Ʋ��ҳ���Ŀ�˂��͡� Ȼ����PIN��늶��O�ܸ��S���������z�y������̖�� ���Ɓ�Դ��Ͷ�����̖ ()������ԭʼ������̖�����ȣ����M�Мy��������Ӌ����x [1]:
�������ԓϵ�y(t��ng)�ľ��ȣ������ͽ��յ��{����̖�����c������ʎ��RLO��ϣ��Ԍ����յIJ���׃�l���^�͵��l�ʣ�RLO-Rf���� Ȼ���@Щ��̖�M�Ў�ͨ�V�����Ԝp������������λӋ��ʹ���҂��Ŀɾ���Cpp�M�����M��̎����
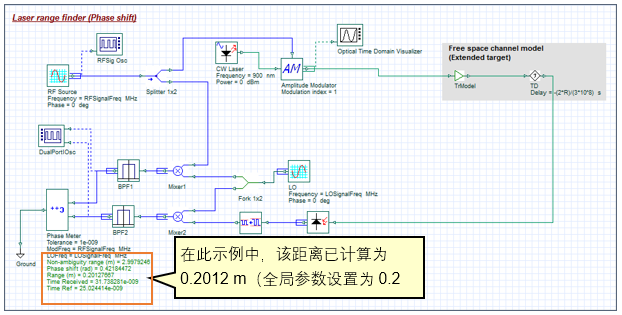
�D4.�y���x�����ƣ�����
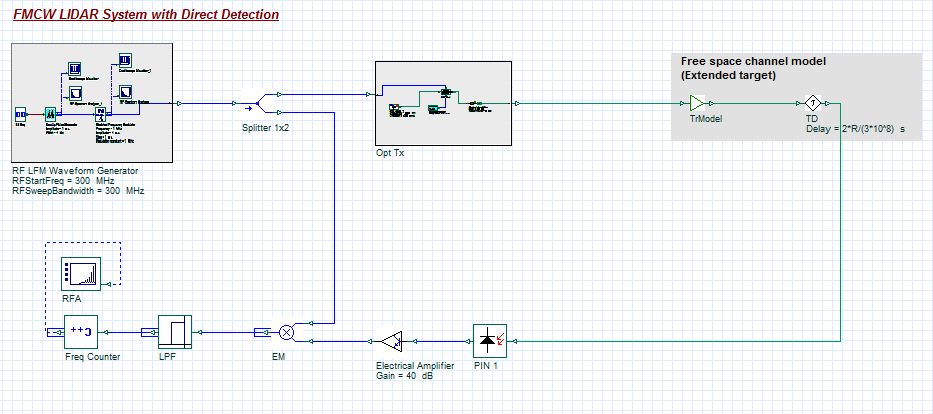
3.�y��(FMCW)
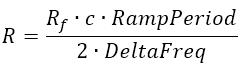
�������ķ������{�l�B�m(x��)����FMCW��LIDAR�� �ѽ��_�l(f��)�˃ɷNģ�ͣ�ֱ�әz�y��FMCW LIDAR����əz�y��FMCW LIDAR�� �ɷNģʽ�Ĺ���ԭ����ͬ�� �l���{�ƵĹ�l(f��)�����l(f��)����̖��Ŀ�ˣ�����ͨ�^��늙z�y���z�y������̖���cԭʼ�����{�l��LFM����̖��ϡ� �S��������̖�ĕr�ӣ��a�����l��̖�� ʹ���l��Ӌ���������҂���Cpp�M�����F�����y���z�y����Rf��̖��Ȼ����������Ӌ��[4]:
����RampPeriod����ȫ�օ�����Time window ��DeltaFreq ���څ���RFSweepBandwidth������ϵ�y(t��ng)RF LFM Waveform Generator�ĽM���������O�ã���
�ɂ��z�yϵ�y(t��ng)֮�g��Ψһ�^(q��)�e��ʹ��ƽ���əz��������һ��ʹ��������z�y���ڻ��ǰ�֏�ݔ�����̖����������ṩ���ߵ��`���ȣ����z�y�^����ɢ�������ƣ�
�D5.FMCW��əz�y����
[1]: Laser ranging: a critical review of usual techniques for distance measurement, Optical Engineering, Vol. 40, No. 1. (2001), pp. 10-19 by Markus C. Amann, Thierry Bosch, Marc Lescure, Risto Myllylä, Marc Rioux
[2]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)
[3]:Fast-Timing Discriminator Introduction, Ortec Inc., http://www.ortec-online.com/-/media/ametekortec/other/fast-timing-discriminator-introduction.pdf?la=en (accessed 10 Feb 2017)
[4]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)
|