ժҪ���҂�ʹ�ý��Ƶ�������Wģģ�M�˰돽�Ĝy����ʹ�ú��εĎι⾀ģ����Q���s��������Wģ�ͣ����Դ_���ڜy���е�ƫ�
1. ����
�돽����y��ͨ��ͨ�^���εĎ�ģ�́�ģ�M�������������R����˜��R���Ĺ⾀�γ��F�β��Ҿ۽���һ�c[1]�����yԇ��W����׃С��/����Ҫ���ߵľ��ȕr���@�����εĎ�ģ�;͕��a�����}���õ��e�`�İ돽�y��ֵ����Ҫ������������Wģ�́����@ϵ�y������Ч������
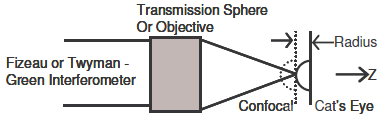
�돽����y����ԭ��D��D1��ʾ��������̩�����ָ���x�������ڰ돽�y�����ڷ�������x�У��˜��R�����۽�Ԫ���������ͅ������档��̩�����ָ���x�У�ʹ�÷���������ֳɅ��������R�����R�������Ԍ������۽����yԇ������
ͨ�^���Ȍ����������ڹ���λ�ã�Ȼ�����Ƅӵ�؈��λ�ã����y�������Ƅӵľ��x����y���yԇ�����İ돽��ԓ���x���ǜyԇ�����İ돽��������˶��ʽ[1]���x��헞���r��������؈��λ���غϡ���ҕ�X�ϣ����ĭh�ǿյġ��������߲��܌������ʴ_�ط����������λ�ã��������ڴ_��������؈��λ�õ���ʴ_�ķ�������ͨ�^�@�ɂ�λ�á�����������С�����ƄӲ���ͨ�^������؈�ەr���҂�ӛ��x����Zλ�á�Ȼ���҂���һ�l���M���x��VS.Zλ�á�������؈��λ����Zλ���S�ϵĽؾࡣ�@�Nͨ�^������؈�۲��M�ķ��������ھ��_�돽�y��[2]���҂����@�����ڰ돽�y����ģ�M��
�D1���돽����y����ģ��ԭ��D
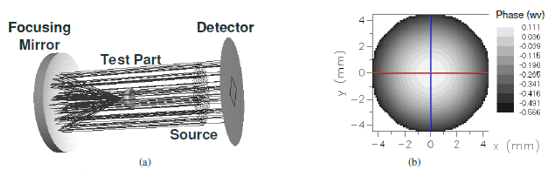
��NIST�ľ��ܰ돽����y������@ʾ�˘˷Q24.466mm�돽��Zerodur��Ĝy��֮�g�IJ�����w�����˜y���x�Cе�y����ͬ�r��ʹ�ò�ͬ�˜��R�ĸ���x�Ϲ�W�y��[2]����ʹ���]�˜y���е�������֪ƫ��Ͳ��_���ԣ��@�N��75nm��400nm�����ȵIJ��Ȼ���ڡ������@�N��Ľ�ጿ����ǹⱻ�ٶ���ѭ��ģ�Ͷ����Ǹ��ʴ_��������Wģ�ͣ��҂������@���M�Мyԇ��
�ڹ�Ď�ģ���У����R����c�c��Ľ��c���l���ھ��x�۽�Ԫ��һ������̎���غϕr���͕����F؈��λ�á�Ȼ����λ�þ��x؈��λ��һ���돽���ڷ�����ģ���У��@�l���ھ۽�Ԫ���IJ�ǰ�����ʵ��ڜyԇ���������ʕr��
�돽�y���ĸ�˹ģ�ͱ����ˮ�ʹ�Î�ģ�Ͷ����Ǹ����s�ĸ�˹ģ�͕r���돽�y���д����`��[3]�������^С�İ돽���֣�<1mm�����@���`������105�������������������^��IJ�����25mm�����нӽ�108�������`������]���а돽���ĸ�˹ģ�͕r��NIST [2]���о��߰l�F��6nm���`�107���������@Щ������ɘ˜��R��ϵ�y�е�������WԪ����ȱ������ġ�
��һ���ǿ��]������Wģ�͡���Ȼ�����c�^��ķ���Ӌ���Dz����еģ������Ҫ���ơ������@�N������Wģ�ͣ��҂�ʹ�Á���Photon Engineering��ܛ����FRED [4]��
2. FREDģ��
FREDͨ�^����Դ�������ƞ��c�W�������������Wģ�ͣ�����ÿ���c�l����˹�ֲ�“����”�� ÿ����˹������ABCD��ꇷ���[5]��ݔͨ�^��Wϵ�y����ÿ������ͨ�^ϵ�y֮�B��“̽�y��”�������IJ�ǰ���Խ���������Wģ�͡�FRED��һ����ҕ��ܛ�����������R�������R��Դ���@ʾ������������λ�á�FRED�����Ўη�����
����ģ�M�돽�y�����҂����Ȳ���ÿ��Ԫ������Դ���۽��R���yԇ������̽�y������FRED�ļ��С�Ȼ���E���Թ�Դ�Ĺ⾀���⾀�ɾ۽�Ԫ���۽����Ĝyԇ���ַ��䣬���ɾ۽�Ԫ����ֱ��Ȼ����̽�y��̎�xȡ����̽�y��̎������ݔ���Dz�ǰ����λ���҂������������Eͨ�^������؈��λ�ã����@��ÿ���c����λ�D��Ȼ���҂�ʹ��Matlab�xȡ��λ������Zλ�ã��Դ_��������؈�۵�λ�á��돽�ǃɂ�λ��֮�g�IJ�돽�`���ǜyԇ������ݔ��돽��ݔ���돽֮�g�IJ
�҂���ģ�M�돽�y����ʹ���˃ɂ���ͬ�Ĺ�Դ���҂��yԇ���������A�ο��Ͼ��к㶨���Ⱥ���λ�ĈA�ο��������@ģ�M����ь���b�á��ڶ�����Դ�Ǹ�˹���ȹ�����ͨ�^��׃�����ď��ȣ�ʹ�Ï��ȵįB���Ǹ�˹�ֲ������γ�ԓ��˹��������Դ���L��632.8nm����-�ʣ������O�Þ���ɡ������Ĕ������Ը�׃������Ӱ표y���ĕr�g��ݔ����λ���҂��yԇ�˲�ͬ���ߴ�Ĺ�Դ����ֱ����4mm������x��ֱ����150mm�Ĵ�߶ȸ���x��
�҂��yԇ�˃ɷN��͵ľ۽�Ԫ�������FREDʹ�Ì��H��W���������ǽ��S���ƣ����Ե��͵��R����̫��ĸ��ӵ�����ˣ��҂�����ʹ�Ò���������۽�Ԫ��������ʹ�þ��ЈA�F���棨�Ԝp�������R����۽�Ԫ�����҂�ͨ�^��׃������yԇ��ͬ�Ĕ�ֵ����
�҂��yԇ��һϵ�Мyԇ�������돽��0.25mm��1mm����������x�b�ã��돽25mm���������ں��^����x��ģ�M̽�y���������֣��ҿ��Ը�׃��ʹ�õ�����Խ�࣬�y���ٶȾ�Խ��������Ӱ���λݔ�����D4��a��ʾ����ʹ�Ò�����۽�Ԫ����ʾ���y�����D4��b���Ǯ�����λ��؈�۸����r�IJ�ǰ��λ�D�ĈDƬ����Ҫ���`�����x�����@��������������ȫ��؈��̎��
�D4.��a��FRED�а돽�y��ʾ��D��b������FRED��ǰ��λʾ��
3. �Y��
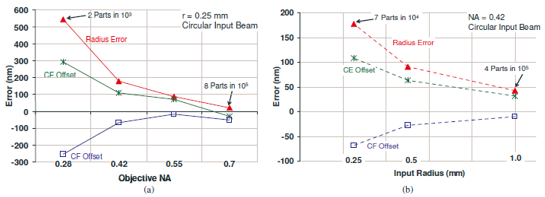
����ƪ�����ƣ���̎�H�@ʾ�ˎׂ��Y����ԓģ���@ʾ�˰돽��؈��λ�ú���λ��̎���`�Ҳ�����f��ݔ���돽������ݔ��돽������؈�ۺ���λ�Õ���ƫ�ơ��D5�@ʾ�����ڸ�׃NA�Ͳ����ߴ���]�и��ӵ���������x��ģ�͵ĽY������D5��a����ʾ���`���S����NAĿ��׃С�����ӣ����A�ڵ��ǘӣ���齹�c�^���⣬�����^��IJ������`���^С����D5��b����ʾ��������f/3.2��25mm�돽ݔ�벿���ĺ��^�߶ȸ���x���`���133nm��106��5���������@���`���������_ʼ�����NIST�Č�������@ʾ�IJ[2]���@Щ�`������κ�����������͵���������ӵ�ģ���У��t�A���`����ӣ��@���҂��Ĺ�������һ�h����
�D5.ʹ�Î�ģ�Ͷ����Ǹ��ӏ��s��FREDģ�͵��`�������Դ������x�b�á�
4. ӑՓ�Ϳ��Y
�҂��A�yģ�ͼ��O�����ڽ��c�^���ܵ������Еr�Q�齹ɢ���ڽ�ɢ�c�������侀����ֱ�ڲ�ǰ���Լ�“��λƫ��”[6]����ʹ���ڟo��ǰҲ����ˡ���ˣ������ķ��������`������һƪ������ܺõؿ��Y����r��“���ڲ�ͬ���|֮�g�ď�������̎���н�ɢ�IJ����ķ�����Ȼ��һ���ش�����...�҂���֪���κάF�еĻ��ڹ⾀��ģ�Ϳ��Է����@�N��r”[7]�����������ǰ돽�y���еĜyԇ���������˽�Q�@�����}�����������ܛ���еĸ�˹����Դ����Q�@�����}���@�N���ڹ�W��ģ�ķ����@Ȼ���ڱ������ķ����ȣ������ڴ˽�BFRED�е��`�����δ���о��ķ���
�҂��M�������IJ��_���Է�������һ�����_������ɢ����λ�ÈD�M�ϵIJ��_���ԣ�����ģ���ϡ�����㷨�е��`����C���������Ժ͝���˔M���㷨�е��`�������ɔM������İ돽���_�����в��ӣ������ڴ������r���Թ�Ӌ��±40nm��FREDģ���е���һ�����_���ԁ�Դ���x��ݔ��⾀�����Ĕ��������C�е����ؔ������@Щ�x����ݔ���돽�е�±31nm����Դ����±64nm��̽�y�������IJ��_���ԡ��҂�ʹ�ú��εĺ͵�ƽ���������M���@�������_���ԁ�Դ���Թ�Ӌ����FREDģ�͵İ돽�IJ��_���Ԟ�±81nm������@�N���_���Ժܴ�FRED��̫��������У���ڎ�ģ���Л]�п��]�ĸ߾��ȵ�ƫ������҂���Ȼ����ʹ��FRED����څ�ݡ�
�҂�ָ������ʹ�ú��Ύ�ģ�Ͷ����Ǹ����s��������Wģ�͕r���ڰ돽����y���д����`�ԓ�`���S�������돽�ĜpС�����RNA�ĜpС�����ӡ��@���`����������ڽ��һЩ���Y���аl�F�IJ�����ǣ�������Wģ�͵Ľ��Ʋ��������ģ�Ҳ���в��_���ԡ��@�N���_����ʹ��ܛ������������У���y���е�ƫ�ԓܛ���������@ʾ��ʹ�Î�ģ�Ͷ�����������Wģ������IJ��_���ԵĴ�С��
5. �����īI
[1] J. Breivenkamp and J.Bruning, “Phase Shifting Interferometry,” in Optical Shop Testing, D. Malacara, ed. (John Wiley and Sons, Inc., NY,1992), 501-598.
[2] T.L. Schmitz, A.D. Davies, and C.J. Evans, “Uncertainties in interferometric measurements of radius of curvature,” in Optical Manufacturing and Testing IV, H.P. Stahl, Ed., Vol. 4451 of Proceedings of SPIE (SPIE, Bellingham, WA, 2001), 432-447.
[3] K. M. Medicus, Improving Measurements Based on the Cat’s Eye Retro-Reflection, Diss., (UNC Charlotte, Charlotte, NC 2006).
[4] Photon Engineering, 440 South Williams Blvd., Suite # 106 Tucson, Arizona 85711, 520-733-9557.
[5] Jacques Arnaud, “Representation of Gaussian beams by complex rays,” Applied Optics, 24, 538-543, (1985).
[6] G.W. Forbes and M.A. Alonso, “Using rays better. I. Theory for smoothly varying media,” JOSA, 18, 1132-1145, (2001).
[7] G.W. Forbes and M.A. Alonso, “Using rays better. III. Theory for smoothly varying media,” JOSA, 18, 1357-1370, (2001).
����Դ��Medicus, Kate M., and A. Davies. "Physical Optics Modeling of the Interferometric Radius Measurement." Optical Fabrication and Testing2006
|