ժҪ
Littrow�Y(ji��)��(g��u)�dž�ɫ�������V�x���C������һ�N�dz����õĶ����Wҫ��ŵķ�������Ŀ����������ǵ�������ǵ���r�«@�����Ч�ʡ��@Ȼ���@�N��͵�ϵ�y(t��ng)����ͬԪ����λ�÷dz����У����⣬�@Щ���λ��ʮ����ه���L��ŵ����ڡ��҂����@���ṩ��һ������(j��)Littrow���õĹ�W(xu��)�b�ã����ң�ͨ�^һЩ���̣���ʹ�ڲ��L�������ڵ�׃���£�Ҳ�ܱ����@Щ���λ�á�
��ģ�΄�(w��)
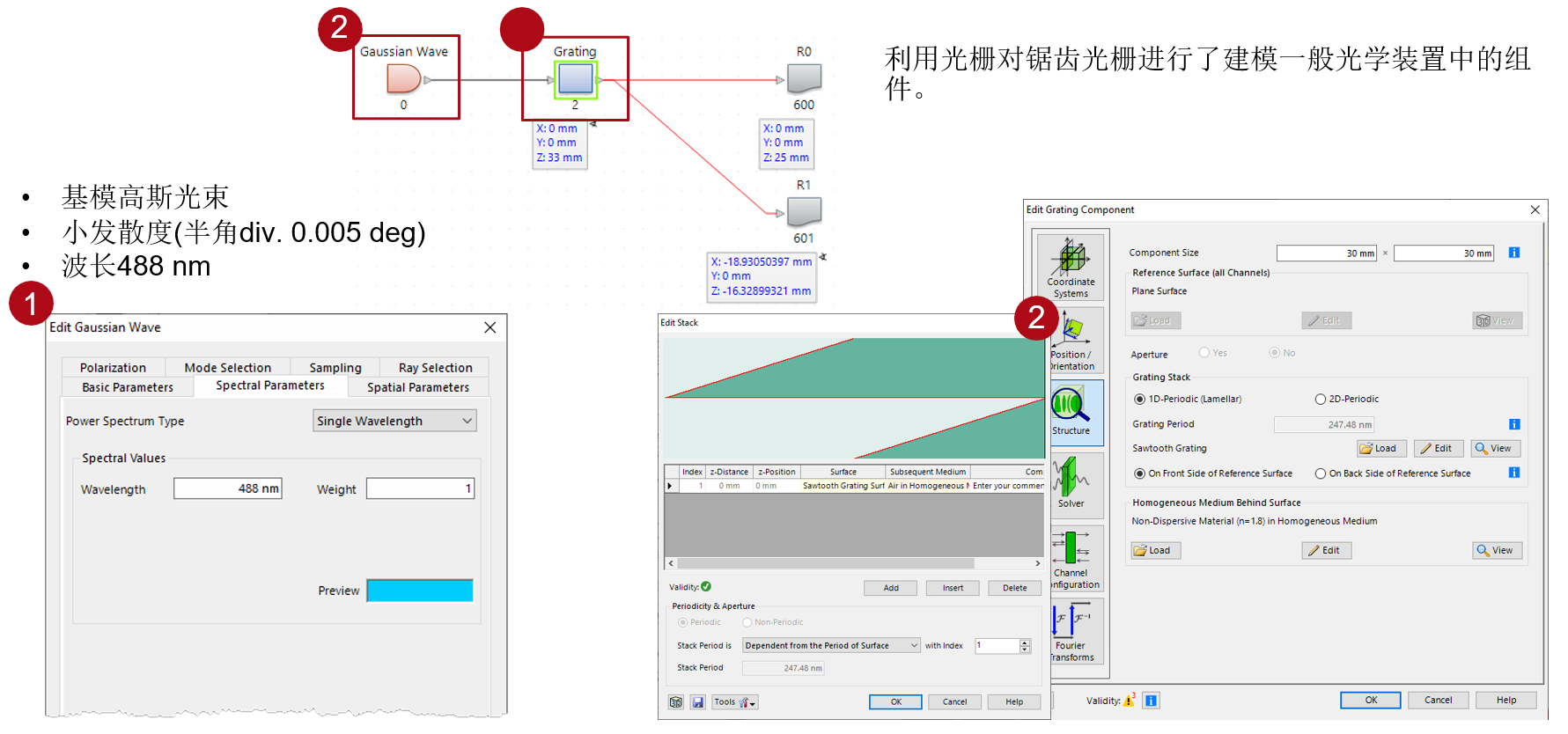
VirtualLab Fusion�еą���(sh��)������Կ��Ԏ�������ϵ�y(t��ng)��ʹ��ź�̽�y��������(j��)Littrow�ԄӶ�λ��
��Դ
• ��ģ��˹����
• С�l(f��)ɢ��(���div. 0.005 deg)
• ���L 488 nm
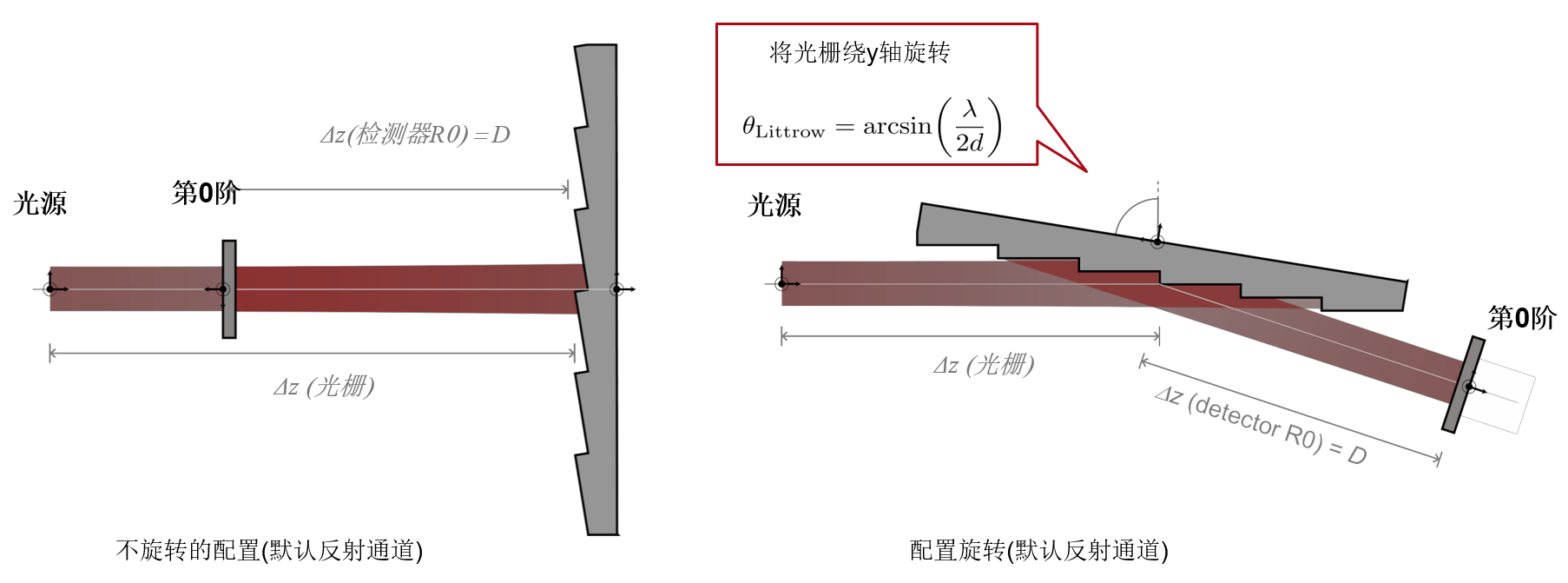
Littrow����
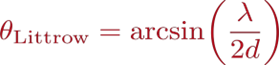
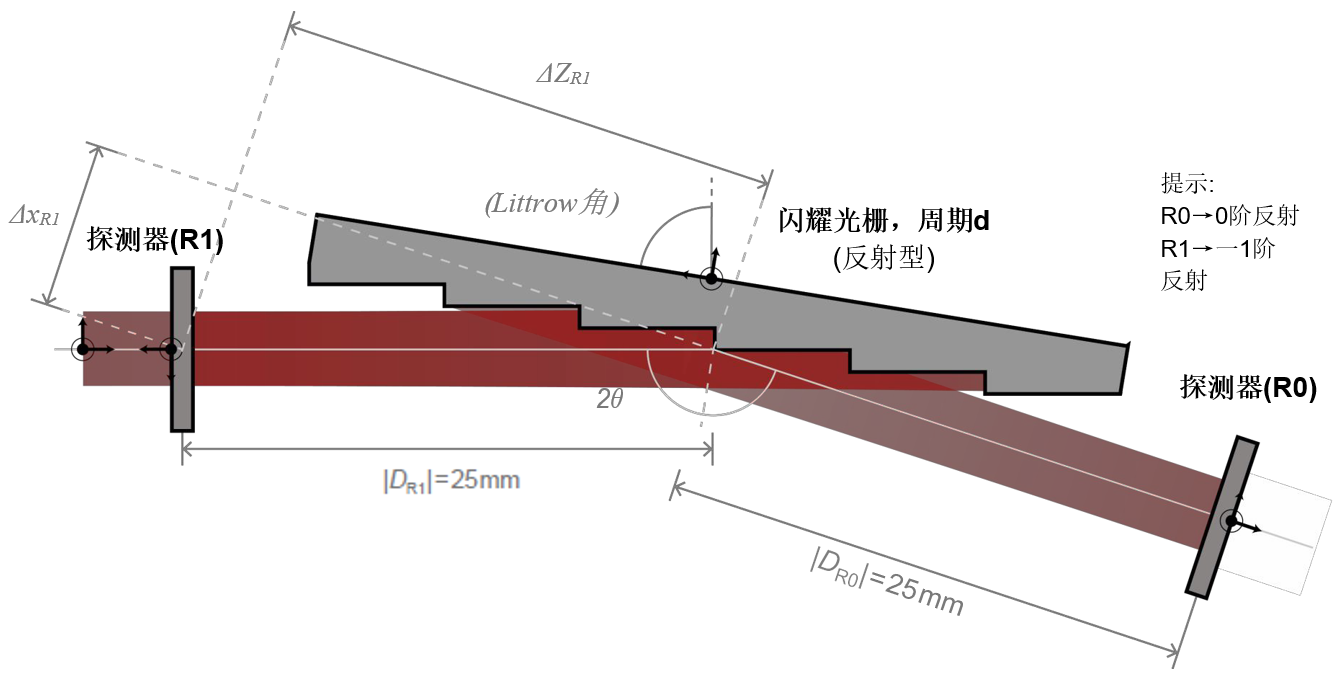
• ���^��“Littrow”�Y(ji��)��(g��u)��һ�N��Ŷ���������O(sh��)�ã�Ŀ���Ǵ_�������һ�A�����(R1)�������������
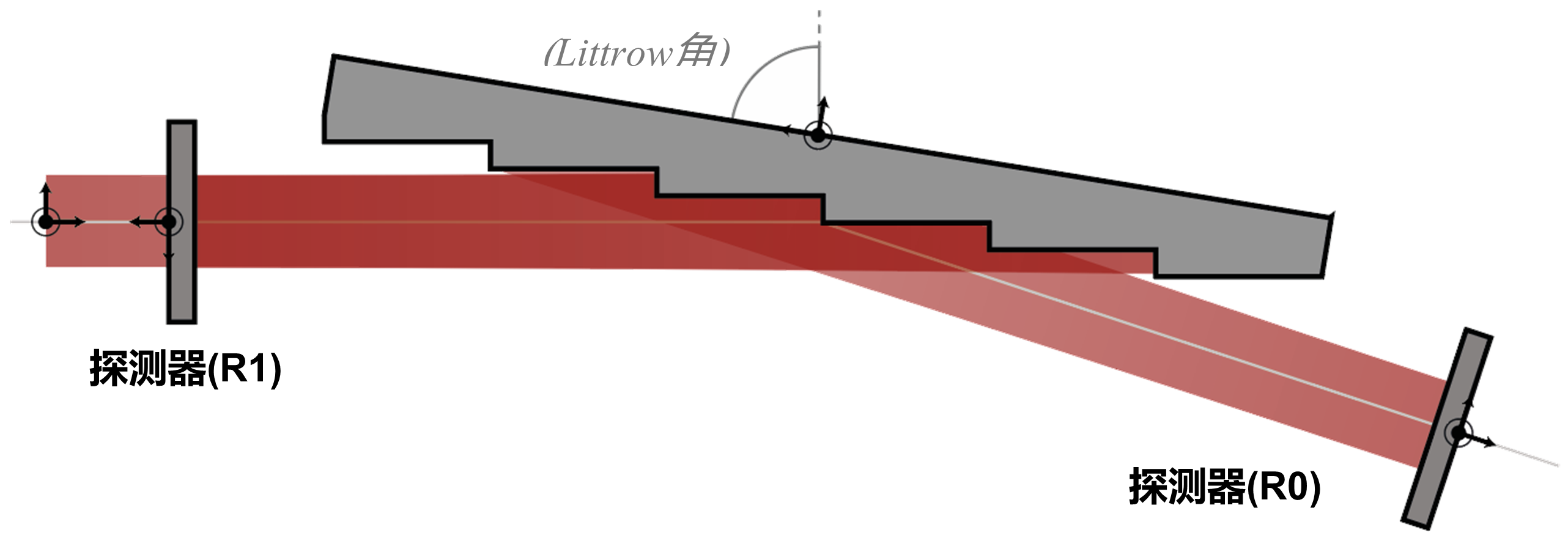
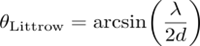
• �՚��з���Ĺ�ŷ��̣� 
����𝛼��𝛽��𝑚�քe��ʾ����ǡ�����Ǻ������A��(sh��)��
• ���˵õ���һ�����A������ǣ�����������ǣ���ŷ��̾�׃�ɣ� 
• ��ˣ�������������IJ��L��ŵ����ڿ���Ӌ�����ŵ����D(zhu��n)�Ƕ�(Littrow��)��
ϵ�y(t��ng)��(g��u)��ģ�K-��Դ�ͽM��
ʹ�Å���(sh��)���
�@����W(xu��)�O(sh��)���ѽ�(j��ng)����ʹ�Å���(sh��)������ԣ��@���S�Ñ�����ͨ�^�����B��ϵ�y(t��ng)�Ķ�������(sh��)��׃����
���@�N��r�£���ŵ����D(zhu��n)���Լ��ɂ�̽�y���ķ����λ��(һ����0�A��R0����һ����1�A��R1�����Ƿ���)��ͨ�^����(sh��)����ԄӴ_����
0�A(R0)��Ŷ�λ̽�y�������D(zhu��n)
��VirtualLab Fusion�����D(zhu��n)��W(xu��)ϵ�y(t��ng)�е�һ��Ԫ���r��Ĭ�J�ķ���ͨ��(�c��ŵ�0�A�غ�)��������һ������˹�������ɵ�����ϵ��
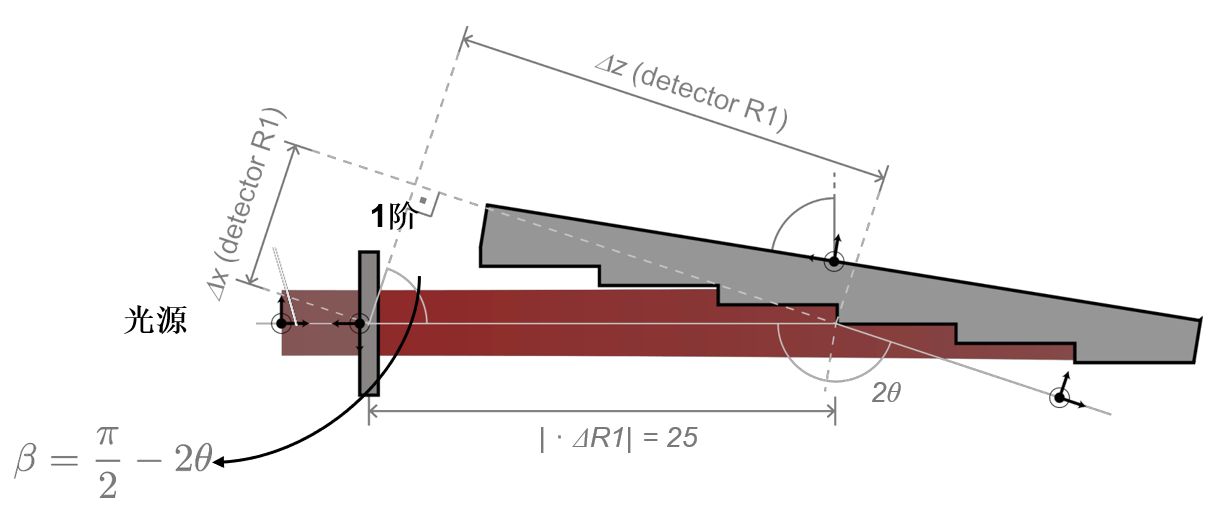
1�A����̽�y���Ķ�λ(R1)
R1̽�y����λ���E��
�@y�S���D(zhu��n)-2θ
����x�����Ƅ�̽�y����ΔxR1

����z�����Ƅ�̽�y����ΔzR1
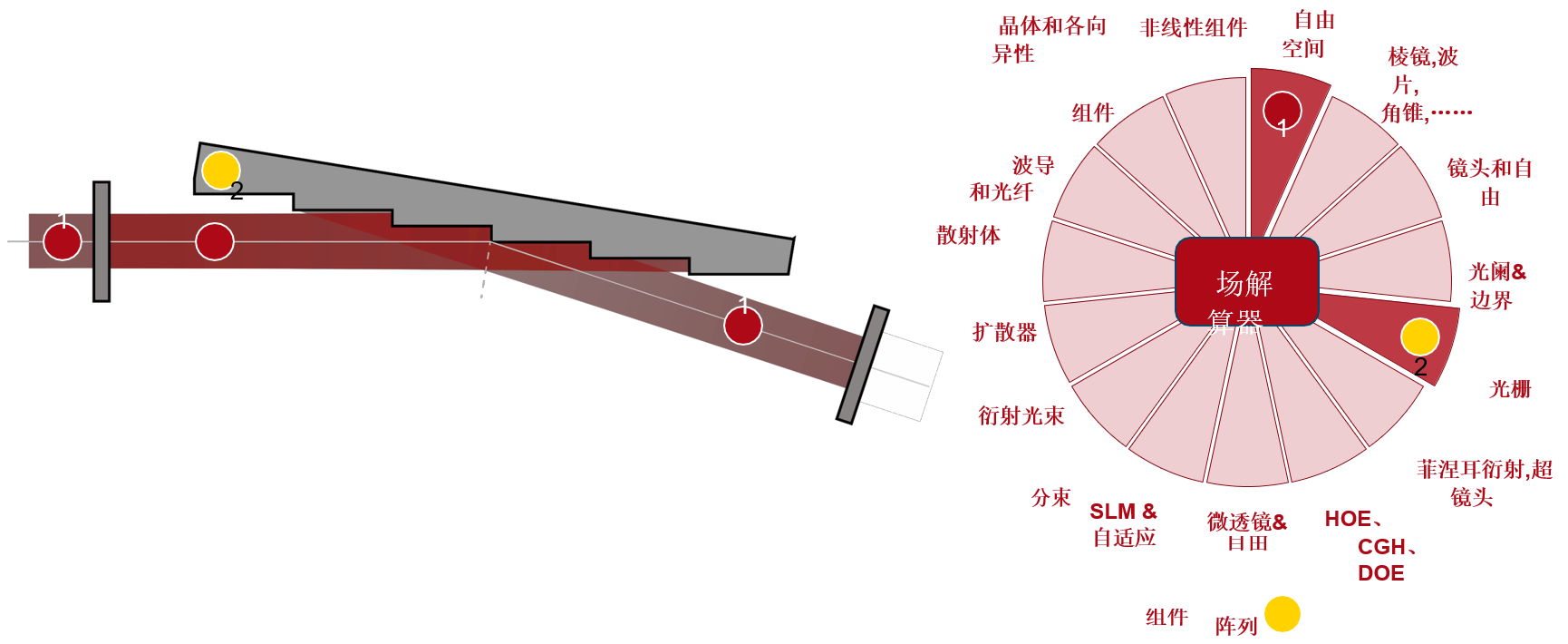
λ���Ԅ�����
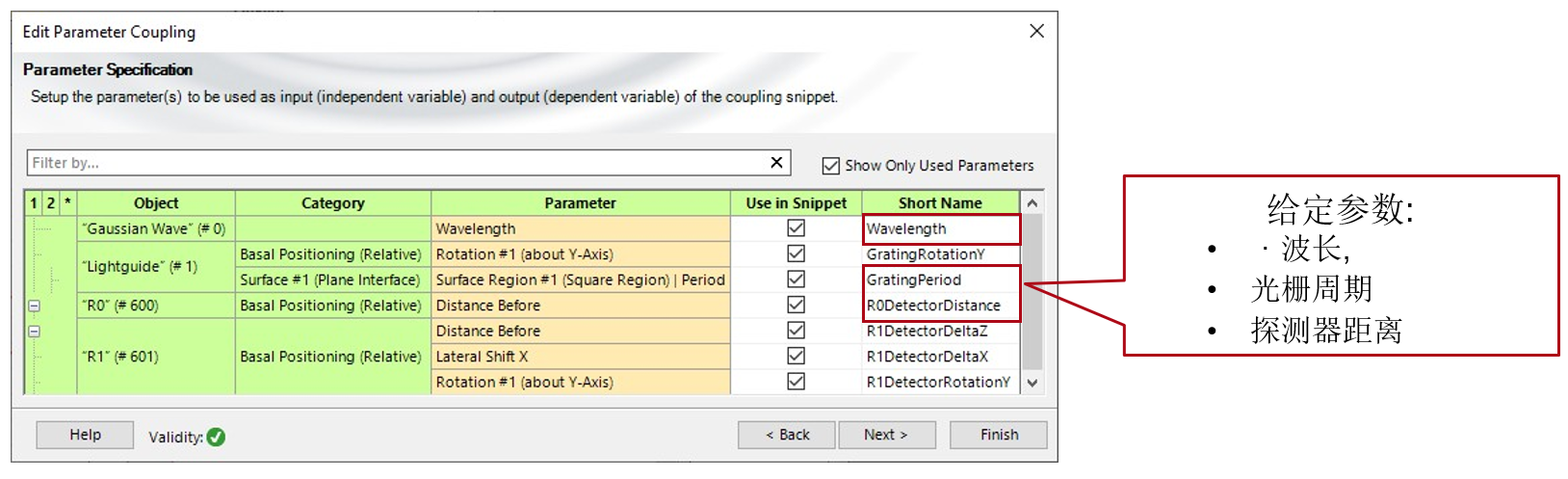
ͨ�^�ɾ��̅���(sh��)��ϣ�VirtualLab�����Ԅ���ɹ�ŵ����D(zhu��n)��̽�y��R0��R1�Ķ�λ��

������W(xu��)ģ�M�Y(ji��)��(�wһ��)
������W(xu��)����Y(ji��)��
VirtualLab�ںϼ��g(sh��)
�ęn��Ϣ
�Mһ������x
- �ø����~ģ�B(t��i)��(FMM)�����l(f��)����
- ���ý��昋(g��u)���ŽY(ji��)��(g��u)
- ����������|(zh��)��(g��u)���ŽY(ji��)��(g��u)
|



עӍ����늵���ӆ�̖��")