ժҪ
VirtualLab Fusion�ą���(sh��)��(y��u)���ęnʹ�Ñ��܉�?y��n)����W(xu��)�b�Ñ�(y��ng)�÷Ǿ��ԃ�(y��u)���㷨��ԓ�ęnָ��(d��o)����Ƀ�(y��u)�����ò���Kݔ���Y(ji��)�����@��(g��)��������˅���(sh��)��(y��u)���ęn�IJ�ͬ�x�(xi��ng)���O(sh��)�á�Ŀǰ�������N�ֲ�?j��)?y��u)���㷨��һ�Nȫ�փ�(y��u)���㷨��
 ����(sh��)��(y��u)���ęn
����(sh��)��(y��u)���ęn
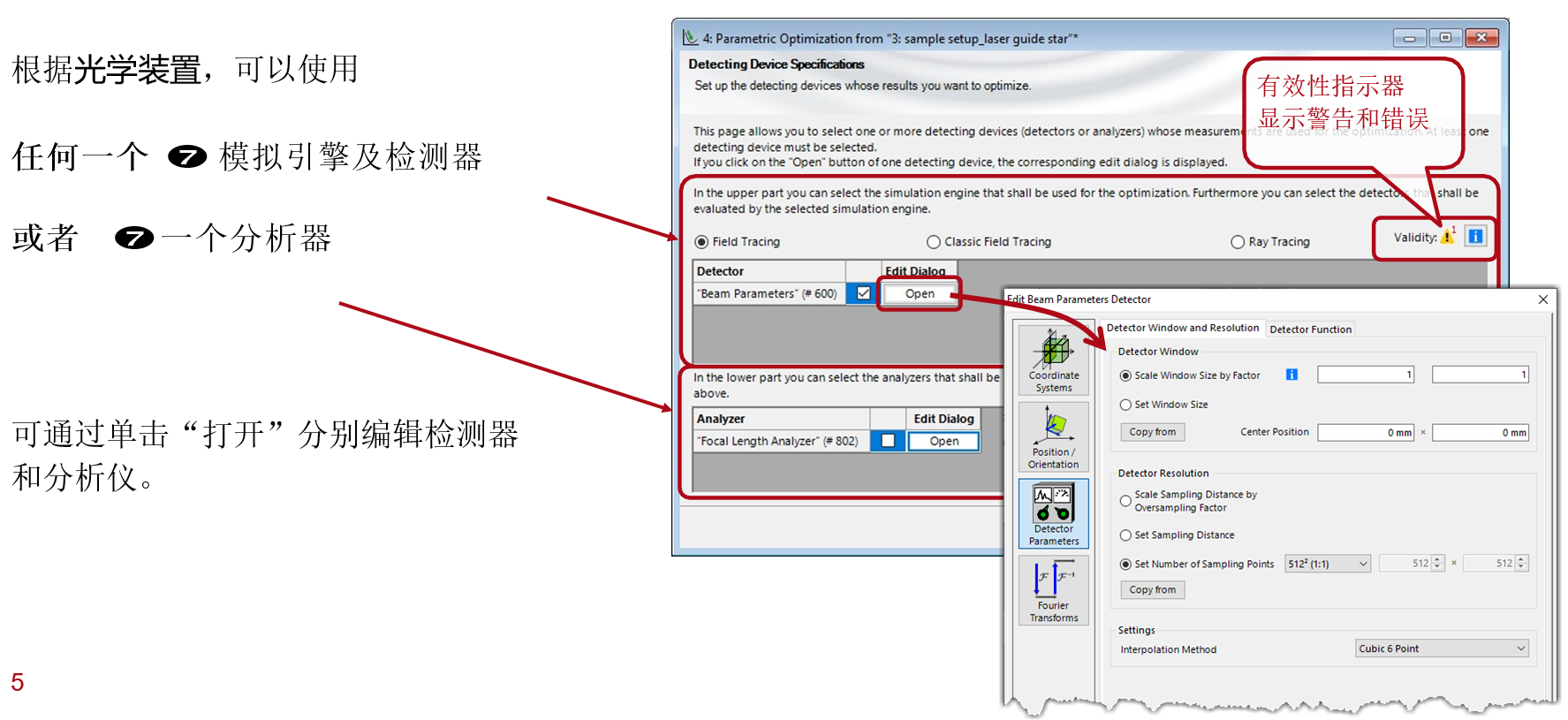
���Ԟ��W(xu��)�b�����Ʌ���(sh��)��(y��u)���ęn��ԓ��W(xu��)�b��ͨ�^(gu��)̽�y(c��)��������xݔ��Ҫ��(y��u)���Ĕ�(sh��)�֡�
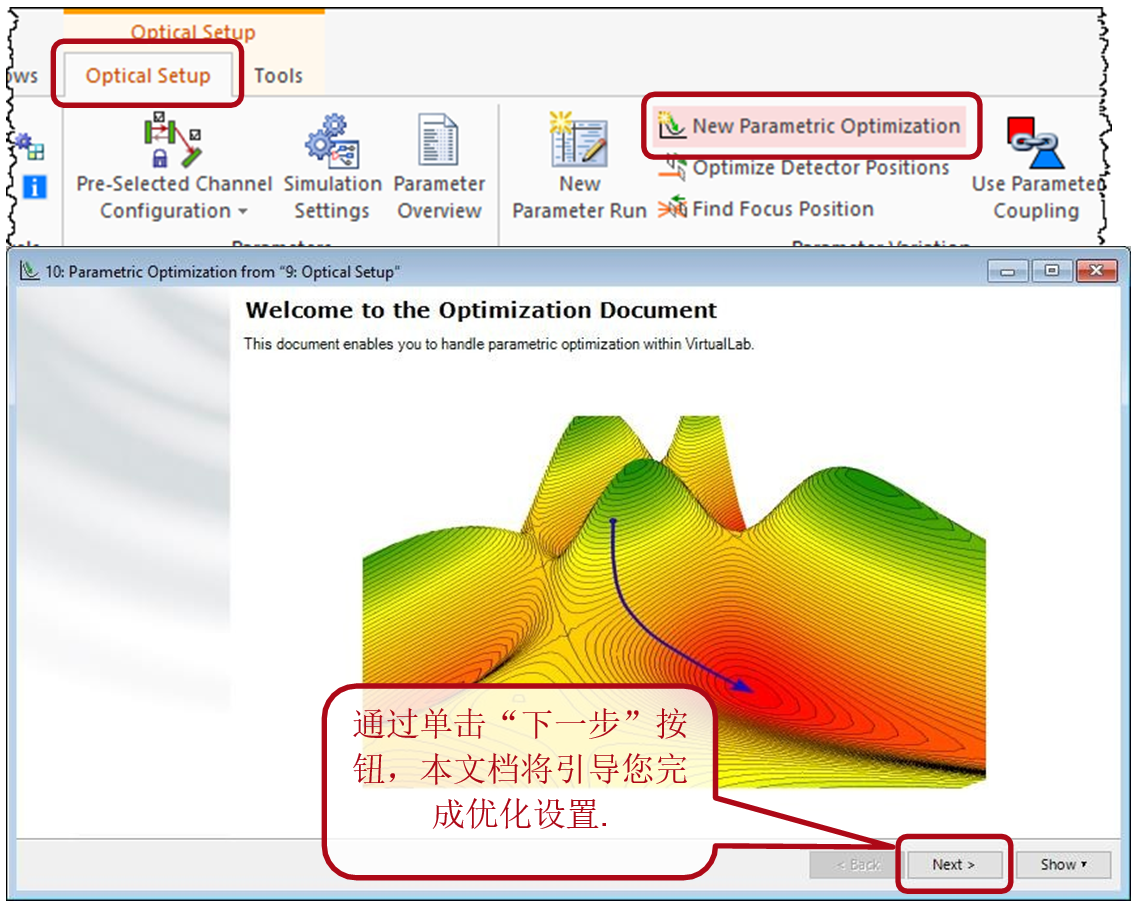
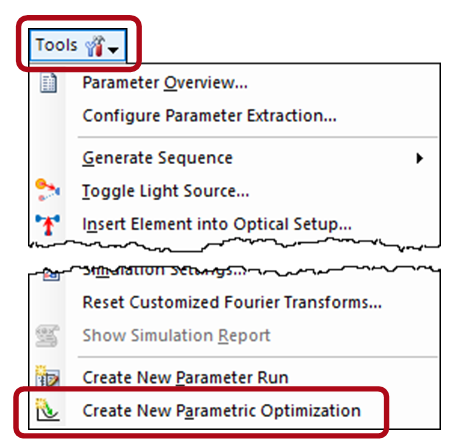
����(sh��)��(y��u)���ęn����ͨ�^(gu��)����;�����_(k��i)
•���܅^(q��)�(xi��ng)Ŀ��W(xu��)�b��>�
���(sh��)��(y��u)��
•����I“Ctrl+T”
•��W(xu��)�b�þ����Ĺ��߰��o
����(sh��)�x��
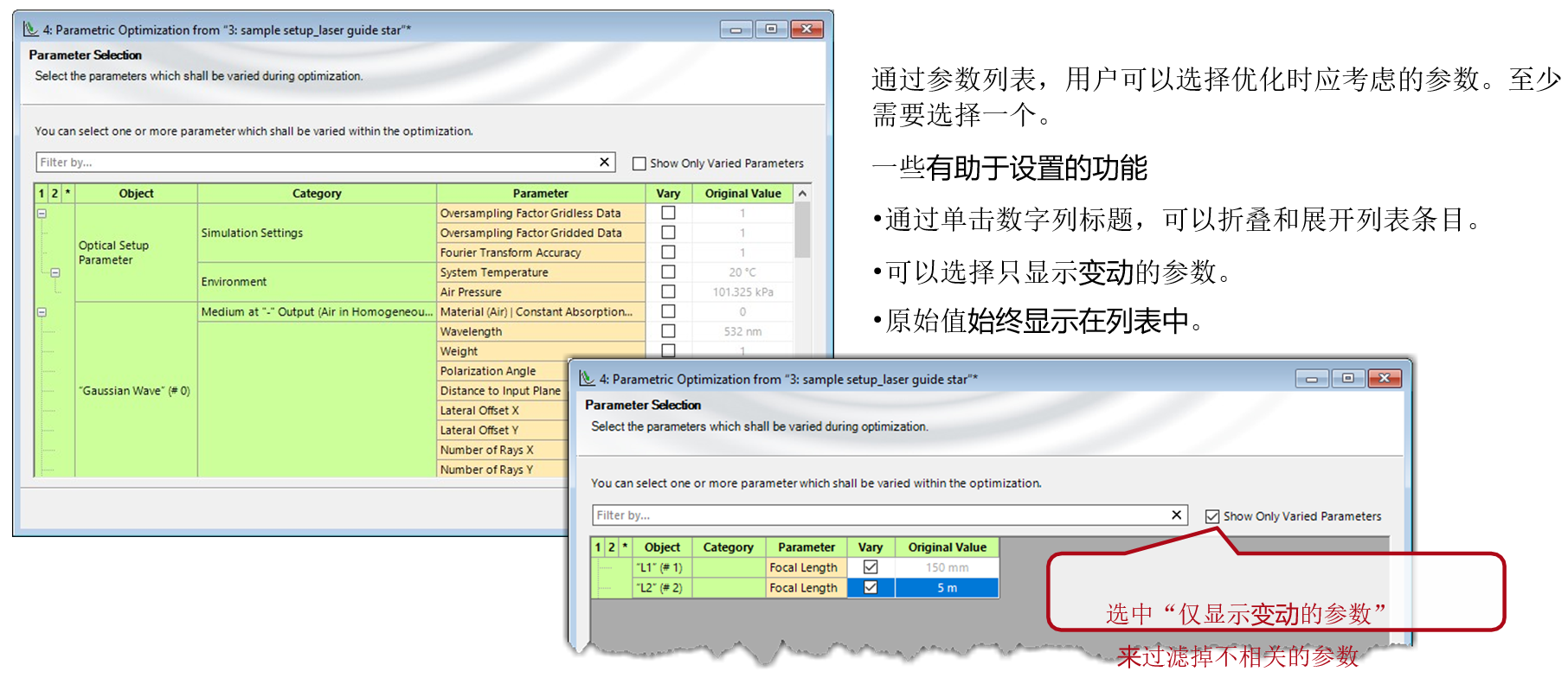
�z�y(c��)�b��Ҏ(gu��)��
ָ���s���l��
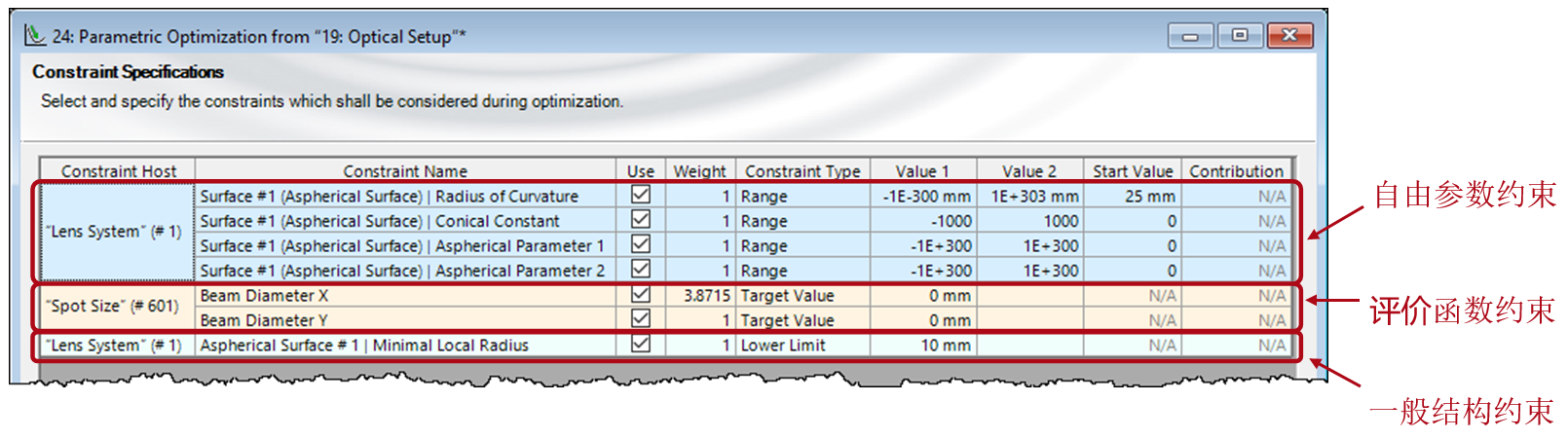
�ڴ��(y��)���ϣ��Ñ�����ָ���s����ͺ��P(gu��n)(li��n)ֵ
• ϵ�y(t��ng)�x�������Ʌ���(sh��)
• ̽�y(c��)��������xӋ(j��)��������u(p��ng)�r(ji��)����(sh��)
• ���ܵ�һ��Y(ji��)��(g��u)��(sh��)����ȡ�Q�����Ʌ���(sh��)������ֱ���ġ�
ָ���s���l��
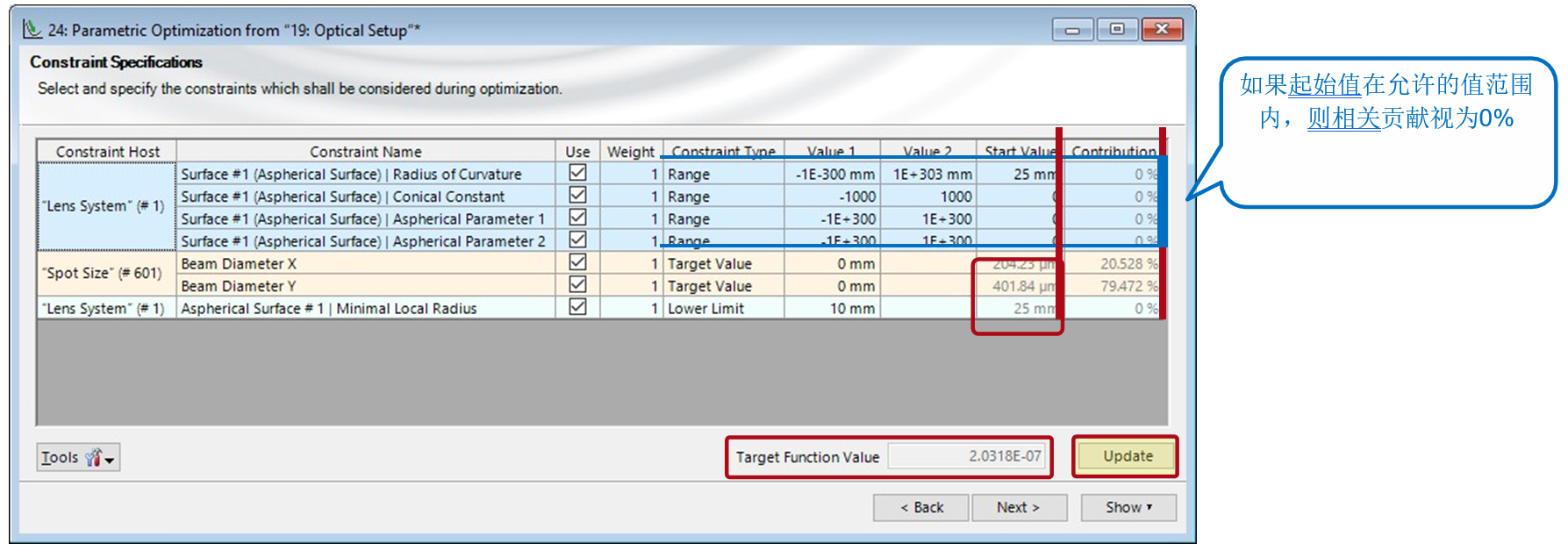
ͨ�^(gu��)�Γ�“����”�����|�l(f��)��W(xu��)�b�õ����Ʌ���(sh��)����ʼֵ��ģ�M�����a(ch��n)�����u(p��ng)�r(ji��)����(sh��)��������ʼֵ���Լ�
→ ������(du��)��(y��u)����ؕ�I(xi��n)�����P(gu��n)�Ի�(y��u)�ȼ�(j��)��
→ �����r(ji��)ֵ����(sh��)ֵ=Ŀ��(bi��o)����(sh��)ֵ�����x�����мs���ļә�(qu��n)�͡�
��(qu��n)���cؕ�I(xi��n)
��(y��u)���������x��
�����ṩ�ă�(y��u)����ּ��ʹĿ��(bi��o)����(sh��)ֵ��С����
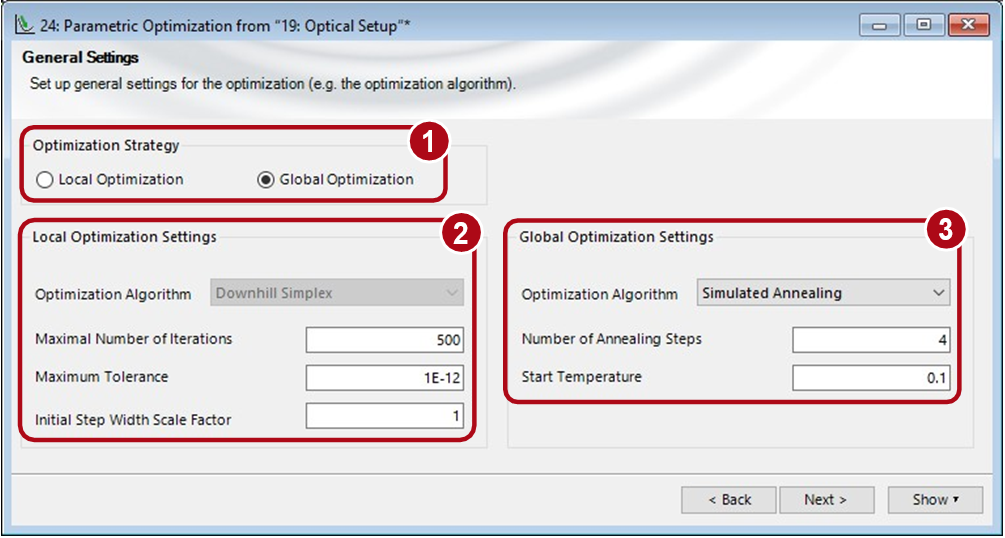
1. �x��(y��u)�����ԣ��ֲ���ȫ�֣�
2. ���x�ֲ�?j��)?y��u)�����O(sh��)��
• �x��(y��u)���㷨
• ��(d��ng)�_(d��)���������Δ�(sh��)*���c��һģ�M���E��ƫ��С�����**�r(sh��)���㷨ֹͣ��
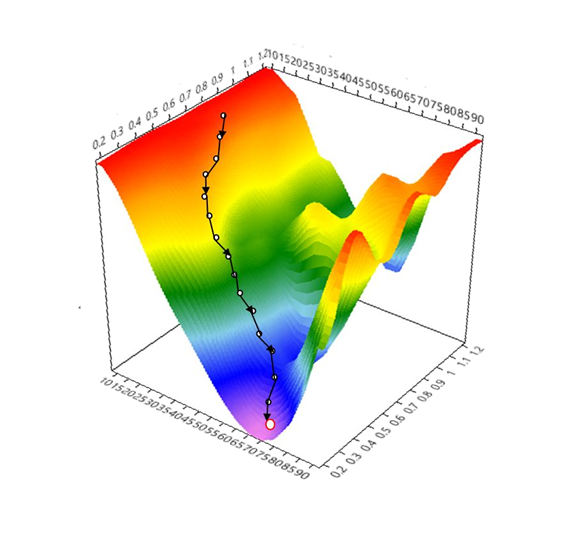
• ͨ�^(gu��)��ʼ���L(zh��ng)�������ӣ��������Ʌ���(sh��)����ʼֵ����һ�ε���ֵ֮�g�IJ��L(zh��ng)���������s�š��������Ƴ�ʼ�����܇��������^(q��)��
• eg.ͨ�^(gu��)���ߵ�ֵ�����������ֲ���С�^(q��)��
• 3.���xȫ�փ�(y��u)�����O(sh��)��
3. ���xȫ�փ�(y��u)�����O(sh��)��
*�Y(ji��)���б����ܕ�(hu��)�г�����ĵ������@Դ���@��һ��(g��)��(sh��)����һЩ��(y��u)���㷨Ҳ��(hu��)�@ʾ���g����(sh��)�Y(ji��)����
**����(j��)��(j��ng)�(y��n)�������O(sh��)��һ��(g��)���ֵ��ԓֵ�ȳ�ʼĿ��(bi��o)����(sh��)ֵС�s4-5��(g��)��(sh��)����(j��)��
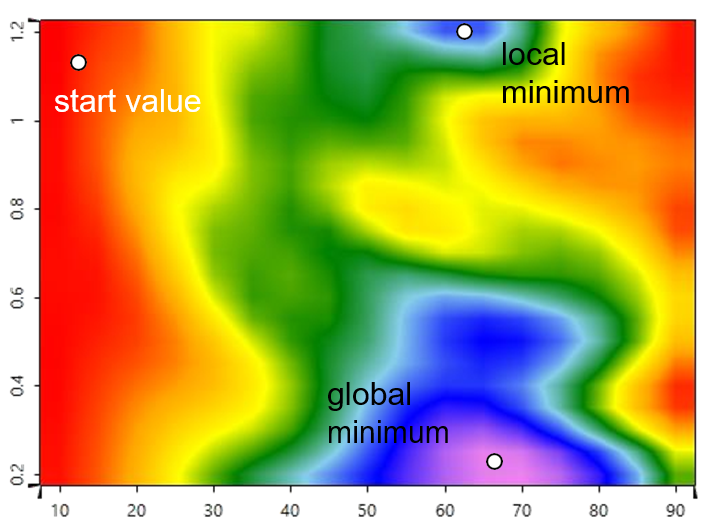
�ֲ���ȫ�փ�(y��u)��
׃����Ŀ��(bi��o)����(sh��)�Dʾ�����S�Ͷ��S��
�ֲ�?j��)?y��u)���㷨�ٶȺܿ죬������?c��)ڌ���ȫ����Сֵ����ijɹ�ͨ���ܴ�̶���ȡ�Q����ʼֵ���x����ˣ��ڲ�֪��������ʼֵ����r�£�ȫ�փ�(y��u)������ȡ��
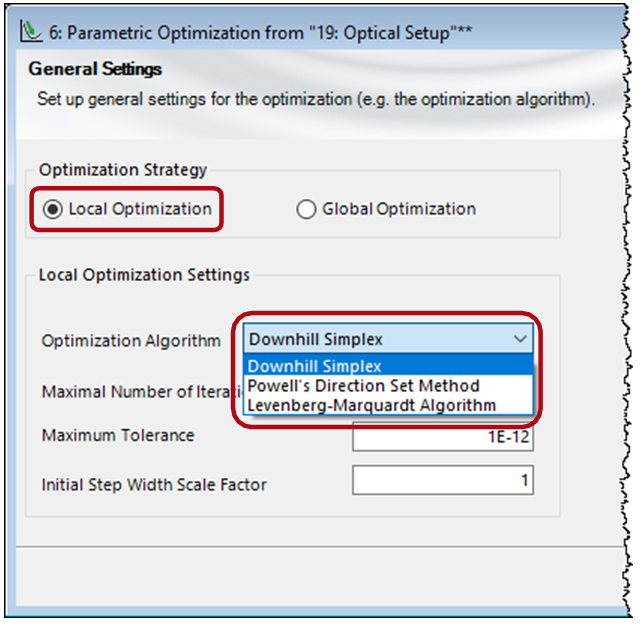
�ֲ�?j��)?y��u)���㷨
Ŀǰ���ṩ�����N������С����Ԫ����(sh��)�ķǾ��Ծֲ��㷨��
Nelder&Mead�����μ��η��������Ք��ٶȲ��Ǻܿ죬������һ�N��(ji��n)�ζ������ķ�����ͨ���m��������6��(g��)���Ʌ���(sh��)��
�U�����������������ܸ��m���ڴ��������Ʌ���(sh��)(>10).
Levenberg-Marquardt�㷨��“�ڸ�˹-ţ�D�㷨���ݶ��½���֮�g�M(j��n)�в�ֵ��[…]���S����r�£��������ҵ�һ��(g��)��Q��������ʹ���ķdz��h(yu��n)����K��Сֵ�_(k��i)ʼ��”�Ք��ǿ��ܵģ������ܱ��C��
���оֲ���С���㷨��������ֲ��OСֵ���L(f��ng)�U(xi��n)�����˱M���p���@�N�L(f��ng)�U(xi��n)�����ԇLԇʹ���^��ij�ʼ���L(zh��ng)�������ӣ��IJ�ͬ�ij�ʼ�l���_(k��i)ʼ����ʹ��ȫ�փ�(y��u)���㷨��
���оֲ���С���㷨��������ֲ��OСֵ���L(f��ng)�U(xi��n)�����˱M���p���@�N�L(f��ng)�U(xi��n)�����ԇLԇʹ���^��ij�ʼ���L(zh��ng)�������ӣ��IJ�ͬ�ij�ʼ�l���_(k��i)ʼ����ʹ��ȫ�փ�(y��u)���㷨��
source: https://en.wikipedia.org/wiki/Levenberg%E2%80%93Marquardt_algorithm from 2021-10-13
ȫ�փ�(y��u)���㷨
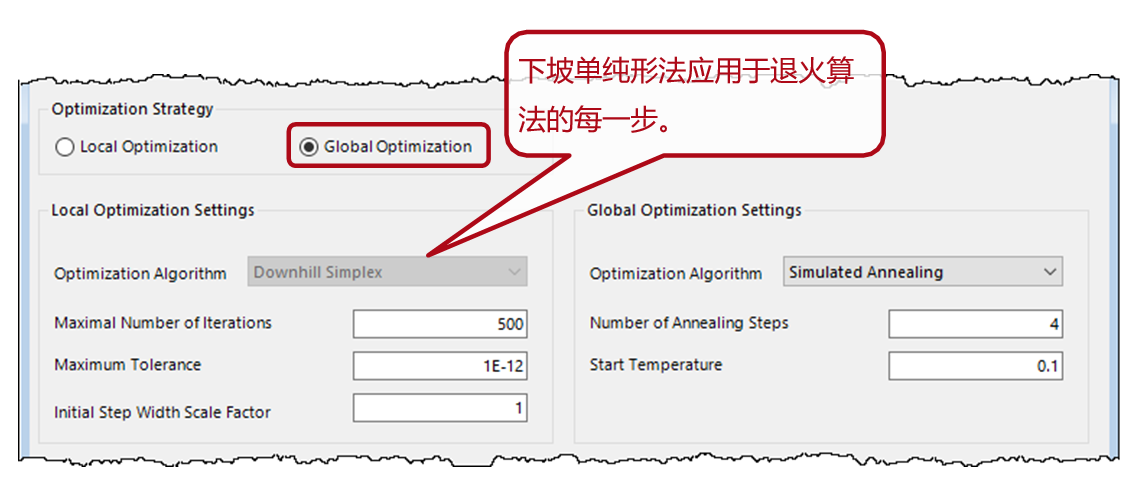
VirtualLab Fusion��ȫ�փ�(y��u)��*�ṩģ�M�˻�ͨ�^(gu��)�����S�C(j��)�ض��(xi��ng)����(sh��)�F(xi��n)��(du��)Ŀ��(bi��o)����(sh��)ȫ����Сֵ�Ľ�������**𝑡 �O(sh��)�Þ鮔(d��ng)ǰֵ����ʹ��
r�ǽ���0��1֮�g���S�C(j��)ֵ�� T�ǜضȣ�ԓ�ضȸ���(j��)�˻�Ӌ(j��)����u���ͣ����п��{(di��o)��(ji��)���_(k��i)ʼ�ضȺ��˻��E��(sh��)��
ȫ�������ijɹ��ںܴ�̶���ȡ�Q���x�����ʼ�ضȺ��˻�Δ�(sh��)���������(d��ng)�ض��^(gu��)�ͣ��㷨���ܕ�(hu��)����ֲ���Сֵ�ĭh(hu��n)���С���һ���棬�^(gu��)�ߵĜض�ֵ������“����”�љz�y(c��)����ȫ����Сֵ���܇��Ŀ����ԡ�
*�@�Nȫ�փ�(y��u)���㷨�����Q���䅢��(sh��)�����ұ���˻�����x�����ǵ���s�^(gu��)�̣��˻��^(gu��)�̌��_(d��)���ӽ��(y��u)�ĵ��ܠ�B(t��i)��
**��ͨ����(hu��)�a(ch��n)��һ��(g��)ȫ����Сֵ�Ľ��ƽ⣬�@ͨ�������ģ����߿������ں��m(x��)�ľֲ�������
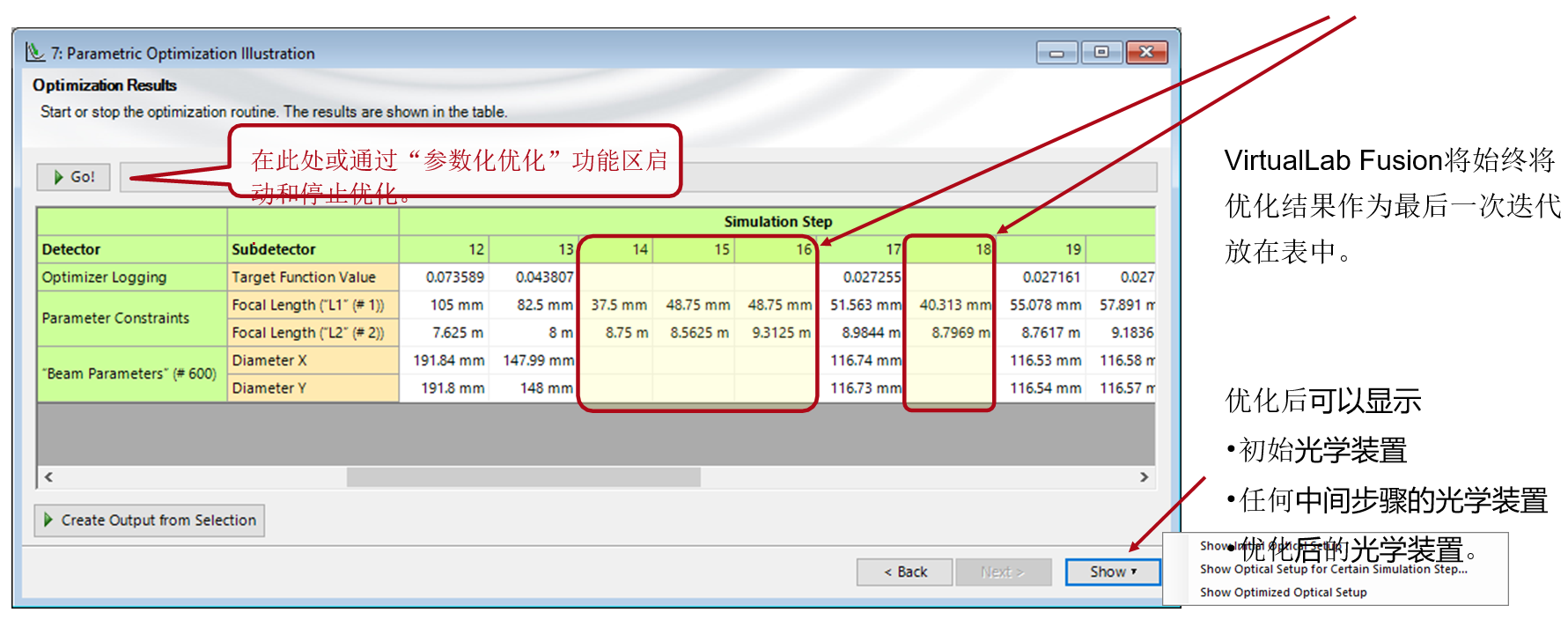
��(y��u)���Y(ji��)��
����K�������@ʾ�˅���(sh��)�����P(gu��n)�Y(ji��)�����ڴ�̎��ͨ�^(gu��)“����(sh��)����(y��u)��”���܅^(q��)����(d��ng)��ֹͣ��(y��u)����ijЩ��(y��u)���㷨�������μ��Σ���(sh��)�H�ϲ����S�s����ȡ����֮���Ǒ��PҎ(gu��)�t����(d��ng)ǰ��Դ�Գ����s���O(sh��)�õą���(sh��)�����нY(ji��)����Ԫ�����ա�
�ęn��Ϣ
|
עӍ����늵���ӆ�̖(h��o)��")