�������ϵ�y��LSC.0001 v1.0��
ʹ�÷������R���������ϵ�y�M�����ܷ���
��������
ϵ�y����
��Դ
- �G����O��
Ԫ��
- �p�S���R����x
- �������R
̽�y��
- �����ͻ�׃
- ������������
- ���c�^��̽�y��
- ��������
ģ�M/�OӋ
- �⾀�E�����������ͻ�׃�����E�����̽�y���Ķ�λ
- ���E�����]����Ч�����M�и����_�Ĺ����ߴ��������о�
ϵ�y�f��
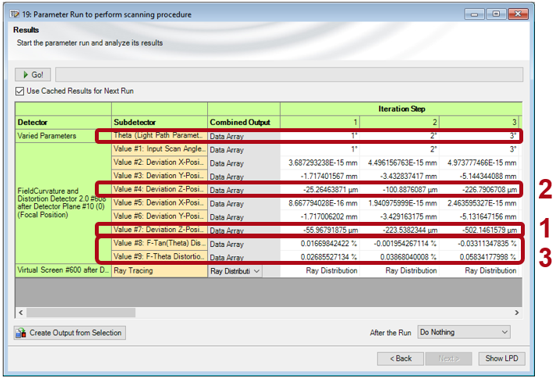
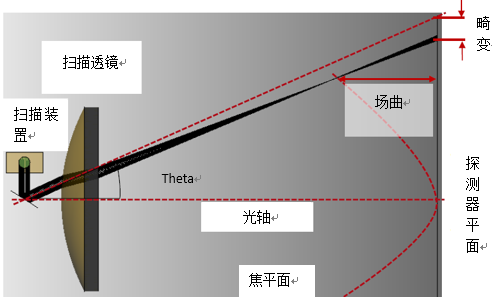
�������ϵ�y�������u��
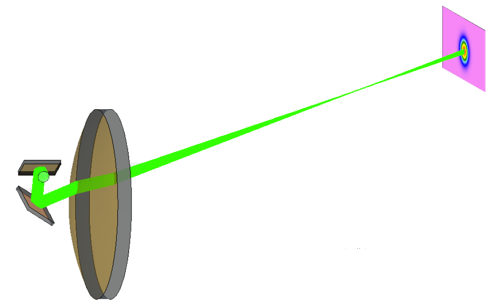
һ���������ϵ�y�Ē����W���ְ�����һ������x��Ԫ��һ���������R����һ�S�����^���У��������Theta����ͨ�^���������Ĉ����ͻ�׃���u�������ܡ�
���⣬Ӌ���˲�ͬ����λ��̎�Ĺ����ߴ��݆����
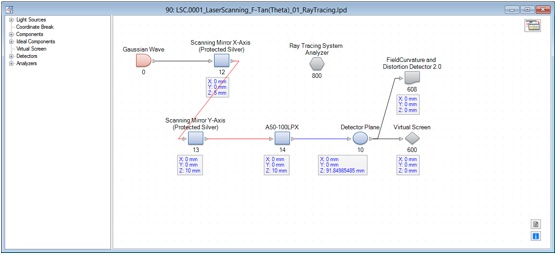
ģ�M�OӋ�Y��
VirtualLab Fusion����������
�ڱ����У��������������x���������
���N̽�y��
- ʹ�È����ͻ�׃̽�y����Field Curvature and Distortion Detector���е��ҵ����cλ�ù��ߣ�Find Focus Position Tool����y�����c����λ��
- ʹ�ý��c�^��̽�y��Ӌ�㽹�c�^���еĈ�
�������
- �{���c����ݔ������W�����θ�R�ӵķ������P
�����\��
- ���Ɉ����ͻ�׃�D
���Y
VirtualLab����
ģ�Mʹ���p�S�����R���ض��Ĺ�W����ļ������ϵ�y
����Ŀ��ƽ���ϵĹ���ƫ�D
- ͨ�^�⾀�E��Ӌ������ͻ�׃
- ͨ�^�Έ��E��Ӌ���������
- ���E���Ը��ʴ_�ط����������c
���ð���Ԕ��
ϵ�y����
��������
LSC.0001��LSC.0002�鼤�����ϵ�y��
���@�������У���������������R�ķ������R�Ĉ����ͻ�׃���ԁ�ģ�Mһ�������^�̡�
��LSC.0002�У���ʾ��ͨ�^ʹ��F-Theta���R��������ܡ�
ģ�M�΄�
�����u���������ϵ�y�����ܣ���һ�S�����^�������������θ̽�y�����ͻ�׃��
Ҏ��ݔ�뼤�����
����M���еĆ�ģ���O�ܼ�����
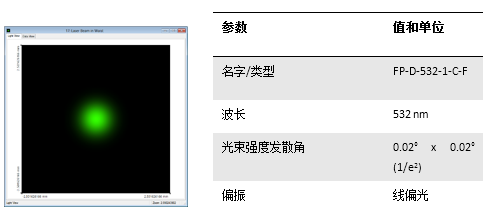
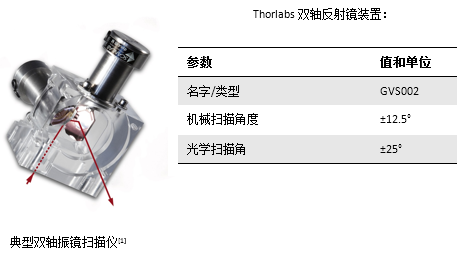
Ҏ���p�S���R����x
Ҏ�������R
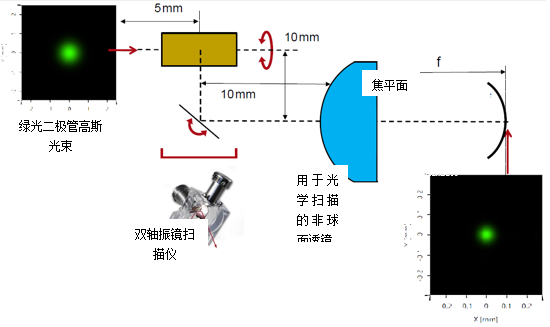
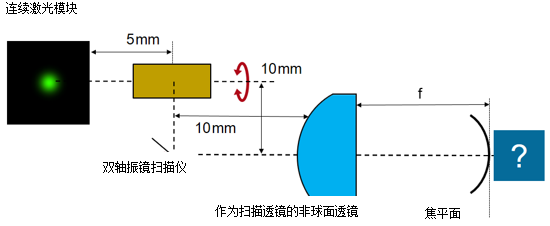
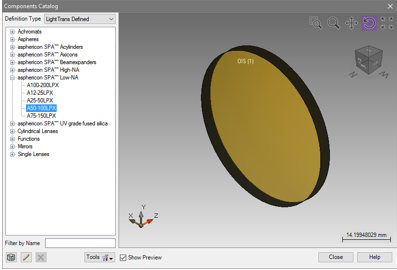
��AsphericonĿ����x��һ��ƽ�棨convex-plano���������R���鼤�����ϵ�y�Ē����W�R��
ԭʼ�R��Ŀ䛺;Wַ��
VirtualLab“LightTrans���x”��Ԫ��Ŀ䛰�������Asphericon��˾���R��
���⣬�������Wվ��Asphericon߀�ṩ��VirtualLab�ļ���
���ð���Ԕ��
ģ�M�ͽY��
�p�S���跴���R��λ��
�p�S�R��ͬ���Ƀɂ����x���R�ӽM�ɡ�
��һ�R��Ŀ�˹���ƫ�D��x���������صڶ����R�ӵ����D�Sƫ�D��
�ڶ������R��Ŀ�˹���ƫ�D��y����
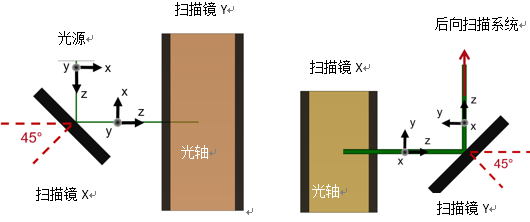
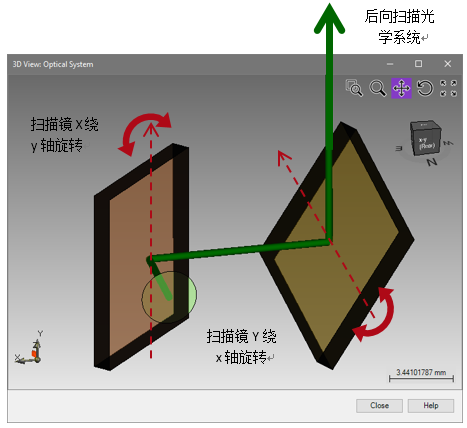
�O�����R
�����RX��y�S���D��ʹ�û��A��λ���M�����D���c���S֮�g�ĽǶȞ�45°��Ҋ��D����
�����RY���{�����ஔ���@x�S�����D��Ҋ�҈D����
Ոע�⣬��VirtualLab������ϵ�y�Ǹ������䶨�Ɂ����D�ģ����S���ط���z ⃑�����x�ġ�
�ɂ��R�ӵĻ��A��λ�Ƕ��x�˼������x������λ�á�
ʹ���R�ӵĽ^����λ�ǣ������ڹ̶�������λ�ã����S����������x�����y������ƫ�x��
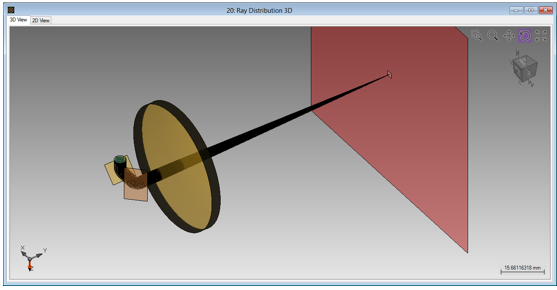
�S�ϵ�3D�⾀�E����
��ͬTheta�ǵĹ⾀�E�f��
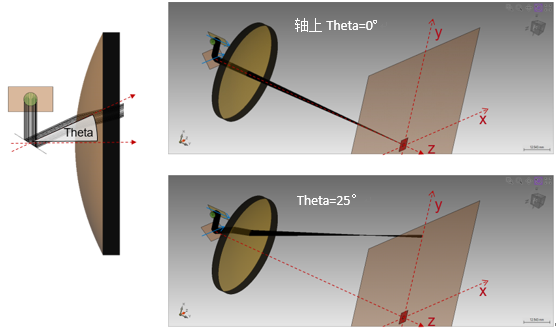
�ڹ�W����ϵ�yǰ���xݔ������Theta��
ͨ�^��������M��ϵ�y�{��
����һ�S�����^�̣�ʹ�Å�����Ϲ��ߡ�
�����RY�Ľ^����λ�����Ԅ��O�Þ�����ݔ�����ǡ�

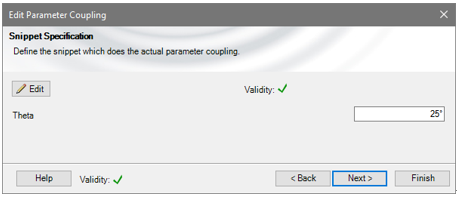
1. �Ñ�ݔ������R������ݔ�����Ƕ�
2. ϵ�y����
3. ݔ��׃��
4. Դ���a�������_�����x��
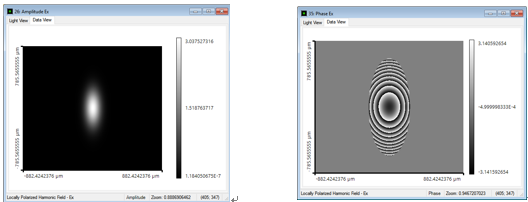
�x�S25º��3D�⾀�E����
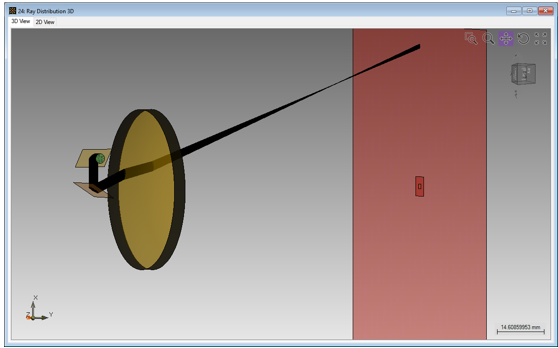
�����ͻ�׃̽�y��
ͨ�^���ҽ��cλ�ù��ߣ�Find Focus Position Tool���������ͻ�׃̽�y�����Ԝy��3D���cλ�ã��ҹ���λ����ه���ڒ����W֮ǰ������ݔ���θ������Ļ�ϵĜy������λ�á�
��ˣ����ͨ�^������Ϲ��߽o̽�y���ṩθ��ݔ��ǡ�
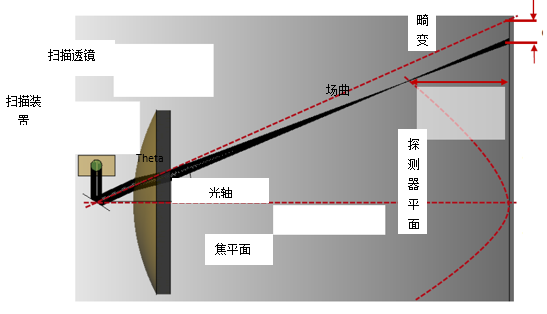
�������^��
���ڒ����^�̽Ƕ�θ��ͨ�^������Ϲ��߁��O�Ò����R������y�S��1°��25°���裬���L��1°��
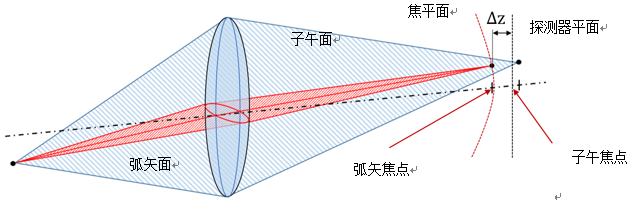
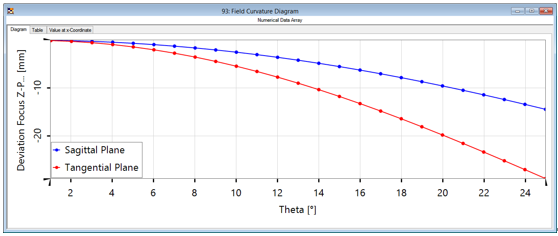
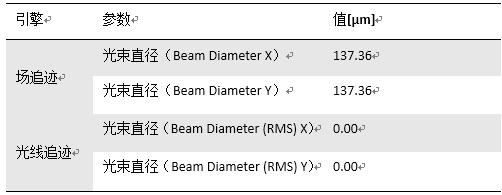
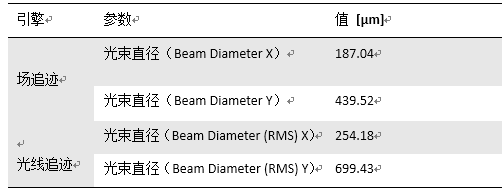
ֻ������y�S���裬��ʸ���c��x����Ĺ�߳ߴ�Q�������罹�c��y����Ĺ�߳ߴ�Q�������挢����B��ʸ������ƽ�棩��
�ą����\���ęn�������L�ƈ����D�ͻ�׃�D��
ʹ��һ�S��ֵ������ж��؈D��ģʽ������(1)�ͻ�ʸ(2)�����ͻ�׃�����Y����һ��
����
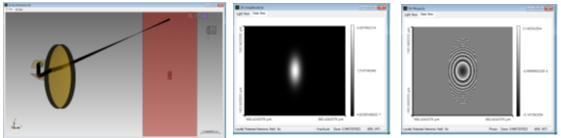
ͨ�^�⾀���Ľ��c��̽�y�����g��∆z����z�S��y������ ��
��ˣ��ڃɂ����x��ƽ�棬���c��ͨ�^��RMS spot radii���������돽�_��������ͻ�ʸƽ�档�����D��һ�������Wϵ�y��ʾ������ڼ���ϵ�y��
����һ��ƽ������棬�@�ǜy���x�S�������x����һ���˜ʡ������ĈD��λ�����������һ��ƽ�档����һ���������ϵ�y���@һ�c�DZ�횿��]�ġ�
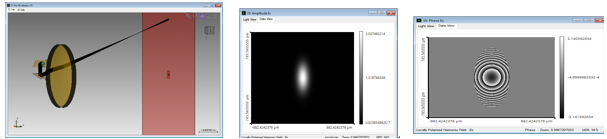
������
�D���@ʾ��������ͻ�ʸ��Ĉ�����
�ĽY���Ͽ�����z�S�y�������ʣ���ʸ����ҪС�����������
��ʸ�������潹�c��zƫ�x�Ķ��Dҕ�D
��׃
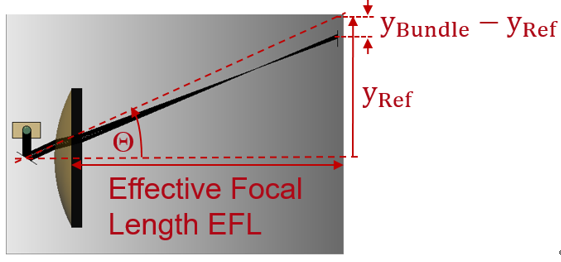
��׃���x��⾀����̽�y�����ϙM��λ��y������λ�õ�ƫ��Distortion=(yBundle-yRef)/yRef��
����
yRef =EFL∙tan��Θ�� ����F-Tan��θ����׃
yRef =EEFL∙Θ ����F-Theta��׃
yBundle ̽�y��ƽ���Ϲ����|�Ļ�������⾀��λ��
ʹ�Ò����Wϵ�y����Ч����EFL����Ӌ��̽�y��ƽ���λ�ã��@��Ҫȡ�Q������ǡ�
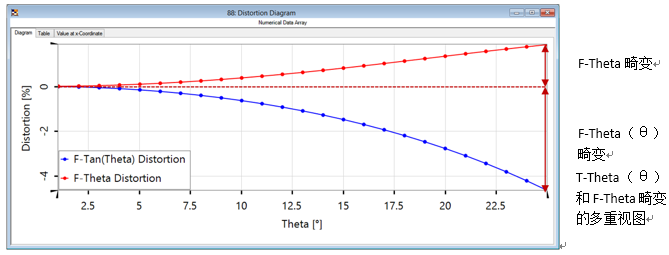
��׃
��׃��ݔ�����ǵ�ƫ�D����������̽�y��λ�õľ��Ԝy������ˣ���׃��̽�y��ƽ���Ϲ���λ������һ��Ӱ푗l����
������ه�Pϵ������tan��Θ��������F-Theta���R����Θ��LSC.0002����
�����@�������F-Tan(θ)���ԣ��������R�܉���õ�У��F-Theta���@����������������R���������R�M�в������У����
�����S�ϵĹ�������
����ǵ��������R��0°��
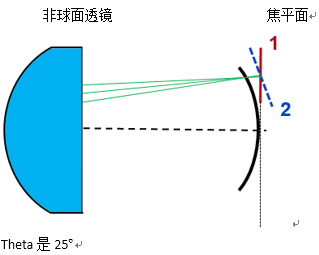
���˸��ʴ_���u�����c��ߣ�ʹ�ÎΈ��E��Geometric Field Tracing ���ͽ��^��̽�y����Focal Region Detector�������������档
��ˣ��c�⾀�E�ĽY����ȣ����ڈ��E����ֱ���u�r�������棬���������ֲ������lɢ�ǡ�����ˮa���Ľ��c�����λ�úͳߴ緽�涼��ͬ��
�����x�S��������
��һ����r�£��c�S�ψ���ȣ��x�S�����ķ�����������ͬ��
��ˣ����̽�y����1�������ڹ��S��Ԓ��������λ�įB����ه�����ķ���
ͨ�^�Aб̽�y��(2)�Ա��⾀����λ�������������ķ��������⾀�ķ���Q����
���ʣ���������λ��ʾ�x����
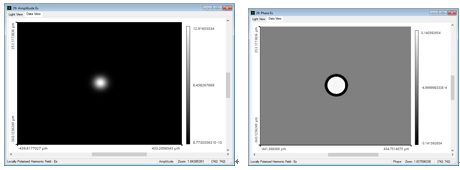
����ǵ��������R��25°��
��̽�y��ƽ�挢̽�y���M�ЙM��ƫ���Լ��Aб��pС�ɘӔ��Է����������档
ͨ�^�E�A�������棨����D������ɢ��ǰ�����҈D����֪���a���Ĺ����ֲ��ܵ���ɢ��Ӱ푡�
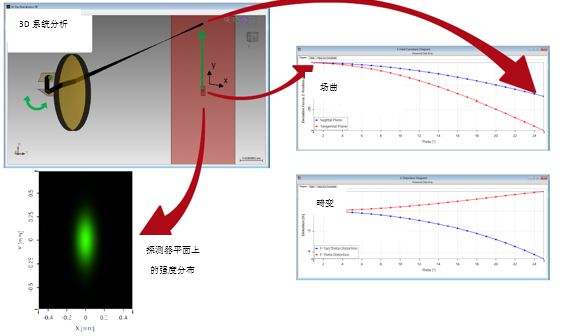
������VirtualLab����
�ڴ˰����У������ԏ������x��������Ы@�棺
̽�y���N�
�ڈ����ͻ�׃̽�y����Field Curvature and Distortion Detector����ʹ�Ì��ҽ��cλ�ù��ߣ�Find Focus Position Tool����y�����c����λ�ã�Find Focus Position Tool��
�ڽ��^��ʹ�ý��^��̽�y����Ӌ�㽹�^���еĈ�
�������
�{�������R��λ�ǣ����������R������ݔ�����Ƕ�theta
�����\��
���Ɉ����D�ͻ�׃�D
���Y
VirtualLab����
ʹ���p�S�����R��ָ�������W�Rģ�M�������ϵ�y
��Ŀ��ƽ���ϣ�����ƫ�D����
ͨ�^�⾀�EӋ�������Ť��
ͨ�^�Έ��EӋ���������
���E���Ը��Ӝʴ_�ط������c����
�Mһ����x
�Mһ����x�������īI
[1] Von Scanlab7 - Eigenes Werk, CC BY-SA 3.0, Werk,CC-BY-SA3.0,https://commons.wikimedia.org/w/index.php?curid=16724483
�Mһ����x
�����ęn�o����һ��Ԕ���������������VirtualLab���O�ú̓�������ϵ�y��
���Tҕ�l��
- ��B��·�D
- ��B�����\��
ʹ�ð�����
- Ԫ���Ķ�λ��ȡ��
- �⾀�E������O�úͽY����ʾ
- ʹ�Å����\���ęn
- һ�S��ֵ������ж��؈D��ģʽ
- ����Rϵ�y-ͨ�^�Έ��E+�M�з���
|